Kako določiti moč elektromotorja in izračunati njegovo učinkovitost
 Elektromotor je elektromehanska naprava, ki temelji na elektromagnetizmu, kar omogoča pretvarjanje električne energije, na primer v delovno ali mehansko energijo. Ta proces je reverzibilen in ga je mogoče uporabiti za proizvodnjo električne energije. Vendar pa so vsi ti električni stroji reverzibilni in so lahko "motorji" ali "generatorji" v štirih kvadrantu ravnin z navorom.
Elektromotor je elektromehanska naprava, ki temelji na elektromagnetizmu, kar omogoča pretvarjanje električne energije, na primer v delovno ali mehansko energijo. Ta proces je reverzibilen in ga je mogoče uporabiti za proizvodnjo električne energije. Vendar pa so vsi ti električni stroji reverzibilni in so lahko "motorji" ali "generatorji" v štirih kvadrantu ravnin z navorom.
Vsebina
Zgodnji razvoj
 Leta 1821, po odkritju priključek elektrike in magnetizma, danski kemik Oersted, Amperov izrek in pravo Biot - Savartov prava, angleški fizik Michael Faraday zgradili dve napravi, ki jo je imenoval "elektromagnetno vrtenje": neprekinjeno krožno gibanje magnetne sile okoli žice - je dejanska predstavitev prvega elektromotorja.
Leta 1821, po odkritju priključek elektrike in magnetizma, danski kemik Oersted, Amperov izrek in pravo Biot - Savartov prava, angleški fizik Michael Faraday zgradili dve napravi, ki jo je imenoval "elektromagnetno vrtenje": neprekinjeno krožno gibanje magnetne sile okoli žice - je dejanska predstavitev prvega elektromotorja.
Leta 1822 je Peter Barlow zgradil tisto, kar se lahko šteje za prvi električni motor v zgodovini: kolo Barlow. Ta naprava je preprosta kovinska plošča, rezana z zvezdico, katere konci so potopljeni v skodelico, ki vsebuje živo srebro in zagotavlja trenutni tok. Vendar pa ustvarja samo silo, ki jo lahko obrača in preprečuje njegovo praktično uporabo.
Prvo eksperimentalno uporabljeno stikalo je leta 1832 izumil William Sturgeon. Prvi enosmerni motor, proizveden za prodajo, je izumil Thomas Davenport leta 1834 in patentiran leta 1837. Ti motorji niso imeli nobenega industrijskega razvoja zaradi visokih stroškov baterij v tistem času.
Elektromotor z DC
 Komutirana enosmerna naprava ima niz vrtljivih navitij, navitih okoli armature, nameščene na vrtljivi gredi. Gred ima tudi stikalo, dolgoročno rotacijsko električno stikalo, ki občasno spremeni tok v navitjih rotorja, ko se gred vrti. Tako ima vsak motor DC motorja izmenični tok, ki poteka skozi vrtljive navitje. Tok teče skozi enega ali več parov ščetk, ki se prevažajo na ščetke komutatorja, za povezavo zunanjega vira energije z vrtljivo armado.
Komutirana enosmerna naprava ima niz vrtljivih navitij, navitih okoli armature, nameščene na vrtljivi gredi. Gred ima tudi stikalo, dolgoročno rotacijsko električno stikalo, ki občasno spremeni tok v navitjih rotorja, ko se gred vrti. Tako ima vsak motor DC motorja izmenični tok, ki poteka skozi vrtljive navitje. Tok teče skozi enega ali več parov ščetk, ki se prevažajo na ščetke komutatorja, za povezavo zunanjega vira energije z vrtljivo armado.
Vrtljiva armatura sestoji iz ene ali več žičnih tuljav, navitih okoli laminiranega feromagnetnega jedra. Tok s čopičem se pretaka skozi komutator in eno navitje armature, zaradi česar je začasni magnet (elektromagnet). Magnetno polje, ki ga ustvari sidro, se stika s stacionarnim magnetnim poljem, ki ga ustvarja PM ali druga navitja (poljska tuljava) kot del motornega ogrodja.
Moč med dvema magnetnima polja poganja vrtilno gred motorja. Stikalo preklopi napajanje tuljave, ko se rotor zavrti tako, da držite magnetnih polov od kdaj v celoti sovpada z magnetnih polov polja statorja, tako da je rotor se nikoli ne ustavi (kot igle kompasa), ampak se zavrti do moči.
Čeprav je večina stikal cilindrična, so nekateri ploščati plošči, sestavljeni iz več segmentov (navadno vsaj tri), nameščenih na izolatorju.
Velik čopič zaželeno širšem območju kontaktnih ščetk bi povečali moč motorja, ampak majhen čopič zaželeno, majhno maso, da bi povečali hitrost, s katero se lahko motor deluje brez pretiranega bounce in čopičem iskrenja. Trše vzmeti za krtačo se lahko uporablja tudi za ustvarjanje določeno maso ščetk pri višji hitrosti, vendar na račun velikih izgub zaradi trenja in pospešeno obrabo krtače in komutatorjev. Zato zasnova DC motorja pomeni kompromis med izhodno močjo, hitrostjo in učinkovitostjo / obrabo.
Oblikovanje motorjev z DC:
- Armature vezja je navijanje, nosi tok tovora, ki je lahko določen ali vrtljiv del motorja ali generatorja.
- Polje vezja je niz navitij, ki ustvarjajo magnetno polje, tako da elektromagnetna indukcija obstaja v električnih strojih.
- Preklopi. Mehansko tehniko, v kateri je mogoče doseči rektifikacijo, ali kot rezultat, lahko dobimo enosmerni tok.
Obstajajo štiri glavne vrste enosmernih motorjev:
- Elektromotor s tlačnim navitjem.
- Elektromotor enosmernega toka.
- Kombinirani motor.
- PM motor.
Osnovni kazalniki izračuna
 O tem, kako poznati moč elektromotorja v izdelku, bo prikazan pozneje, v primer z originalnimi podatki.
O tem, kako poznati moč elektromotorja v izdelku, bo prikazan pozneje, v primer z originalnimi podatki.
Dober znanstveni projekt se ne ustavi pri oblikovanju napajalne naprave. Zelo pomembno je, da izračunate moč motorja ter različne električne in mehanske parametre naprave in izračunate moč motorja z uporabo neznanih vrednosti in koristnih formul.
Za izračun električnega motorja bomo uporabili Mednarodni sistem enot (SI). To je sodoben metrični sistem, uradno sprejet v elektrotehniki.
Eden najpomembnejših zakonov fizike je temeljni zakon Ohma. Navaja, da je tok skozi vodnik neposredno sorazmeren z uporabljeno napetostjo in je izražen kot:
I = V / R
kjer je tok, v amperih (A);
V - uporabljena napetost, v voltih (V);
R je odpornost, v ohmih (Ω).
Ta formula se lahko uporablja v številnih primerih. Odpornost vašega motorja lahko izračunate z merjenjem trenutne porabljene in uporabljene napetosti. Za kakršen koli odpor (pri motorjih je to v osnovi odpornost proti tuljavi), ta formula pojasnjuje, da se tok lahko nadzoruje z napetostjo.
Uporabljena električna moč motorja se določi z naslednjo formulo:
Pin = I * V
kjer je Pin vhodna moč, izmerjena v vatih (W);
I je tok, izmerjen v amperih (A);
V je uporabljena napetost, izmerjena v voltih (V).
Kako vedeti izhodno moč
Motorji naj opravljajo neke vrste delo in dve pomembni vrednosti, ki določajo, kako močna je. To je hitrost in moč motorja. Izhodna mehanska moč motorja se lahko izračuna po naslednji formuli:
Pout = τ * ω
kjer je Pout izhodna moč, izmerjena v vatih (W);
τ je moment sile, izmerjen v Newtonovih metrih (N • m);
ω je kotna hitrost, izmerjena v radianih na sekundo (rad / s).
Ugotavljamo kotno hitrost, če poznate vrtilno hitrost motorja v vrtljajih na minuto:
ω = rpm * 2 * P / 60
 kjer je ω kotna hitrost (rad / s);
kjer je ω kotna hitrost (rad / s);
rpm - hitrost vrtenja v obratih na minuto;
Π je matematična konstanta (3.14);
60 - število sekund v minuti.
Če ima motor 100-odstotno učinkovitost, se vsa električna energija pretvori v mehansko energijo. Vendar taki motorji ne obstajajo. Tudi natančni mali industrijski motorji imajo največjo učinkovitost 50-60%.
Merjenje momenta moči motorja je težka naloga. To zahteva posebno drago opremo. Toda to je mogoče storiti tudi s posebnimi informacijami in formulami.
Kazalniki mehanske učinkovitosti
Učinkovitost motorja se izračuna kot mehanska izhodna moč, deljena z električno vhodno močjo:
E = Pout / Pin
zato,
Pout = Pin * E
po zamenjavi dobimo:
T * ω = I * V * E
T * rpm * 2 * P / 60 = I * V * E
formula za izračun momenta sile je:
T = (I * V * E * 60) / (rpm * 2 * P)
 Za določitev moči motorja je potrebno to povezati z bremenom, da se oblikuje trenutek sile. Izmerite tok, napetost in število vrtljajev. Zdaj lahko izračunate moment navora za to obremenitev pri tej hitrosti, ob predpostavki, da poznate učinkovitost motorja.
Za določitev moči motorja je potrebno to povezati z bremenom, da se oblikuje trenutek sile. Izmerite tok, napetost in število vrtljajev. Zdaj lahko izračunate moment navora za to obremenitev pri tej hitrosti, ob predpostavki, da poznate učinkovitost motorja.
Ocenjena 15-odstotna učinkovitost je največja učinkovitost motorja, ki se zgodi le v določeni hitrosti. Učinkovitost je lahko nič od nič do najvišje - v našem primeru pod 1000 obr / min lahko pride do ne optimalne hitrosti, zato lahko za izračune uporabite 10-odstotno učinkovitost (E = 0,1).
Primer: hitrost 1000 vrt./min, napetost 6 V in tok 220 mA (0,22 A):
T = (0,22 * 6 * 0,1 * 60) / (1000 * 2 * 3,14) = 0,00126 N • m
Kot rezultat je običajno izražen v milimetrih, pomnožen s števci (mN • m). 1000 mN • m • m 1H, zato izračunani navor 1.26 mM • m. To je lahko nadalje pretvorimo v (g-cm), rezultat pomnoži s 10,2 in. Navor je 12,86 g / cm.
V našem primeru je vhodna moč motorja 0,22 A x 6 V = 1,32 W, mehanska izhodna moč je 1000 obr / min x 2 × 3,14 × 0,00126 N • m / 60 = 0,132 W.
 Navor motorja se spreminja s hitrostjo. Brez obremenitve, največje hitrosti in nič navora. Obremenitev dodaja mehansko odpornost. Motor zažene več tokov, da bi premagal ta upor, hitrost pa se zmanjša. Ko se to zgodi, je trenutek sile maksimalen.
Navor motorja se spreminja s hitrostjo. Brez obremenitve, največje hitrosti in nič navora. Obremenitev dodaja mehansko odpornost. Motor zažene več tokov, da bi premagal ta upor, hitrost pa se zmanjša. Ko se to zgodi, je trenutek sile maksimalen.
Kako točen je izračun navora, se določi, kot sledi. Medtem ko je napetost, tok in hitrost mogoče natančno izmeriti, je lahko učinkovitost motorja nepravilna. To je odvisno od natančnosti vašega sestavljanja, položaja senzorja, trenja, poravnave motorjev in osi generatorja itd.
Hitrost, navor, moč in učinkovitost niso konstantne vrednosti. Ponavadi proizvajalec v posebnih tabelah zagotovi naslednje podatke.
Linearni motorji
Linearni motor je v bistvu asinhroni motor, katerega rotor "odvija", tako da namesto ustvarjanja rotacijsko silo vrtečega elektromagnetnega polja, ki jih ustvarja linearno silo vzdolž svoje dolžine z določitvijo pristranskosti elektromagnetnega polja.
Akustični hrup
Zvočni hrup in vibracije Elektromotorji običajno prihajajo iz treh virov:
- mehanski viri (na primer zaradi ležajev);
- aerodinamični viri (na primer zahvaljujoč ventilatorjem, nameščenim na gredi);
- magnetni viri (npr. zaradi magnetnih sil, kot so Maxwellove sile in magnetostrikcije, ki delujejo na strukture statorja in rotorja).
Zadnji vir, ki je lahko odgovoren za hrup električnih motorjev, se imenuje električno vzburjen akustični šum.
 Kako priključiti motor iz pralnega stroja na 220
Kako priključiti motor iz pralnega stroja na 220 Kako preklopiti elektronski števec električne energije
Kako preklopiti elektronski števec električne energije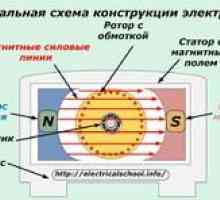 Načelo električnega motorja: kako deluje
Načelo električnega motorja: kako deluje Kako izbrati varilnega generatorja
Kako izbrati varilnega generatorja Kako izbrati visokokakovostni električni motor za čoln pnevmatik
Kako izbrati visokokakovostni električni motor za čoln pnevmatik Enofazni električni motorji 220V
Enofazni električni motorji 220V Kdo je izumil električno energijo v katerem letu: zgodovina odkritja
Kdo je izumil električno energijo v katerem letu: zgodovina odkritja Nasveti za izbiro gospodinjskega električnega mešalnika
Nasveti za izbiro gospodinjskega električnega mešalnika Izračun porabe energije energije
Izračun porabe energije energije Določitev napetosti v tokokrogu električnega toka
Določitev napetosti v tokokrogu električnega toka Koliko ampera je v privatni hiši postavil stroj za odpiranje
Koliko ampera je v privatni hiši postavil stroj za odpiranje Magnetni stroj za stalno vožnjo z lastnimi rokami
Magnetni stroj za stalno vožnjo z lastnimi rokami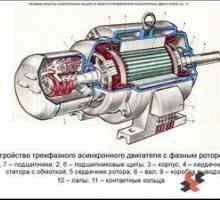 Enofazni asinhronski motor: naprava in načelo delovanja
Enofazni asinhronski motor: naprava in načelo delovanja Poraba energije pralnega stroja v kilovatih
Poraba energije pralnega stroja v kilovatih Sinhroni in asinhroni motorji, njihove razlike in razlike v uporabi
Sinhroni in asinhroni motorji, njihove razlike in razlike v uporabi Načelo delovanja in prednosti motorja pretvornika
Načelo delovanja in prednosti motorja pretvornika Opis električnega ploščnega kompaktorja 220 v smernem delovanju
Opis električnega ploščnega kompaktorja 220 v smernem delovanju Uporaba zaganjalnika za vzvratno vožnjo v krmilnem vezju motorja
Uporaba zaganjalnika za vzvratno vožnjo v krmilnem vezju motorja Priključitev enofaznega števca električne energije
Priključitev enofaznega števca električne energije Koliko stane za zapečatenje merilnika
Koliko stane za zapečatenje merilnika Proizvodnja elektrike za vetrne elektrarne
Proizvodnja elektrike za vetrne elektrarne